

 QQ
QQ
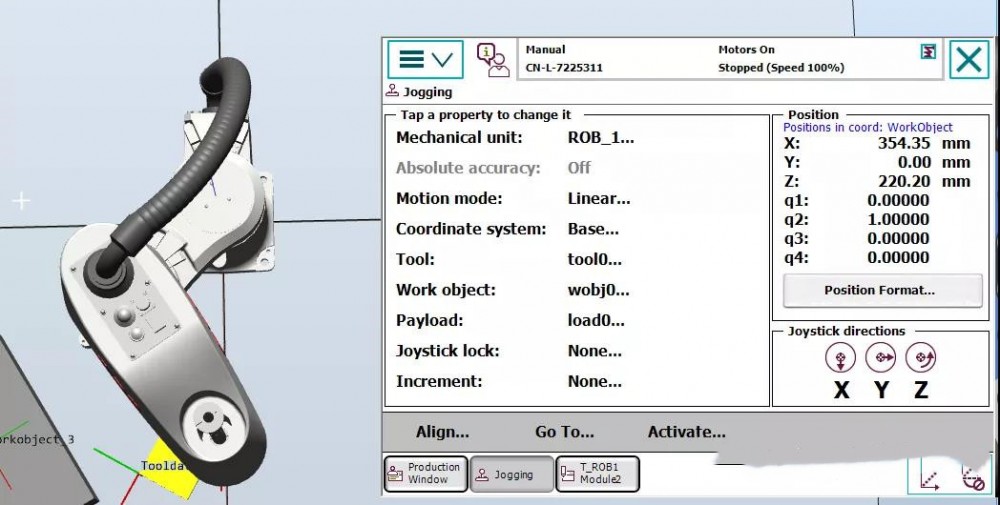
图1
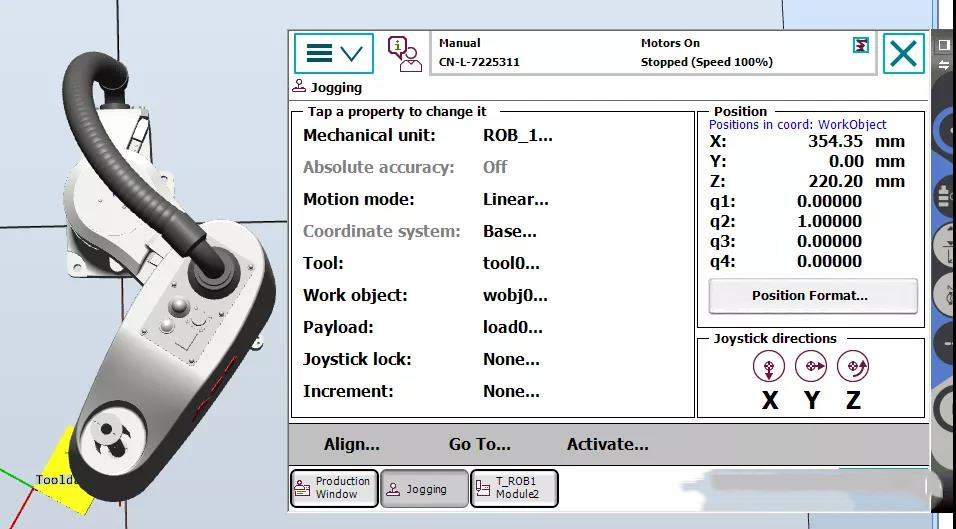
图2
1. 上图中SCARA机器人的笛卡尔姿态是一致的,即SCARA机器人可以以不同的姿态到达空间中的某一点。
2. 图1中的ABB机器人姿态称为右手(即右手)。,轴2在轴1和轴3之间的直线的右边,或者轴2处于正角度)。
3.图2中的机器人姿态称为左手(即2轴在1轴和3轴之间的直线左侧,或者2轴的夹角为负)。
4. 在RAPID中,轴配置confData用于定义点位置的轴配置。对于Scara, ConfData解释如下:
SCARA机器人
仅采用三个配置参数cf1、cf4和cfx。
对于cf1,若1轴在0~90°,cf1为0
若1轴在90~180°,cf1为1
若1轴在0~-90°,cf1为-1
对于cf4,定义类似
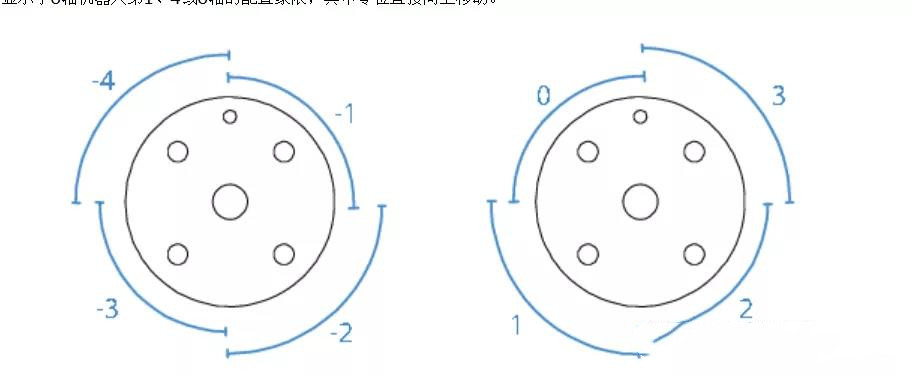
采用cfx值来展示轴2角度的标志。如果轴2角度为负,那么,cfx为1,否则,cfx为0。
5. 若要机器人保持左手或者右手姿态,可以人为修改robtarget中的confdata
转载于:机器人在线
更多:ABB机器人配件
